KiCAD Open Source Schematic to PCB Tools
Last updated: 07 Feb 2012 - 22:19
You may have noticed in the schematics I post for various projects that I use KiCAD for all my designs. It's a free and open source package with no limitations on part count, pin count or board size. The software is cross platform, supporting Linux, Mac and Windows, and on Linux you'll probably find it in your distribution's repositories. Unlike the other big open source electronics design software gEDA it is fairly intuitive and not that different from other commercial packages I've used (OrCAD or Altium Designer). Unlike cost free versions of proprietary software like Eagle there are no reasonable limits on the board size, part count or pin count that you can create with this software and while it lacks some advanced features such as more complex curved pad shapes etc. it is very stable now and is well up to commercial work.
BigTrak jr browser based LOGO programming
Last updated: 29 Jan 2012 - 16:53
The Bigtrak Junior is a re-make of a classic toy apparently. I'd never seen one before, I remember school having a couple of floor turtles but I don't think I ever got to play with them (probably because I'd been messing around too much and not doing my work!). Basically the toy is a little programmable toy car that takes simple commands from a keypad with forward, back, turn left, turn right, pause etc. This is all very well but with only one memory location for storing your program between use and no editor only a "clear and start again" it's not much fun trying to get it to do things. Wouldn't it be better if it could be programmed from a web browser and you could actually use some sort of save/load program option to store your ingenious route design? The solution I've come up with could be argued to be over-engineered some what and quite expensive but I like to look at it as "expandable".
Basic Python webserver for the BeagleBone
Last updated: 28 Jan 2012 - 23:52
The BeagleBone comes with a basic webserver written in Javascript in the bonescript.js file. This is run by node.js which is a browser-less javascript engine. This took a bit of reading about to get my head around because the idea of javascript being used to write server side scripts was a bit odd, but the whole server seemed implausible. Unfortunately when I tried to make this do what I wanted to do for the BigTrak project, node.js wouldn't work and seems to be in some sort of version conflict but has to be maintained at this version for the Cloud9 IDE software. Instead I decided to write my own web page server in Python.
WiFi hotspot and DHCP from a BeagleBone
Last updated: 28 Jan 2012 - 20:55
The BigTrak project had to be mobile, and that meant having a WiFi card attached. This looked simple on the face of it, a USB host socket on the board and a modern 32bit Linux kernel, however it became more complicated partly due to the lack of sources for the embedded system and partly because of my ambitions.
LOGO program interpreter
Last updated: 28 Jan 2012 - 19:49
I was wandering how to store and represent the programs for the BigTrak. I wanted to stick to the original spirit of the toy and make it programmable via the web so I naturally got to thinking of LOGO commands. Most of my experience with the language was in a program called "WinLogo" ironically running on an Acorn Archimedes not Windows at all.
Opto encoded motors with the ChipKit Uno
Last updated: 28 Jan 2012 - 17:14
Having replaced the electronics in a BigTrak junior, I needed some way to control it from my BeagleBone. Initial experiments with driving the L293D directly from GPIO pins were quite successful but I quickly discovered the opto-encoders on the toy were extremely high resolution and needed some proper real-time interrupt based handling. Doing this from the high-level Linux based environment on the BeagleBone just sounded too much trouble to me so I looked around for something a bit lower level to handle the opto-encoder tick counting. I was torn between an Arduino Uno and the ChipKit Uno. In the end I went for the ChipKit for two reasons, the BeagleBone I/O is only 3.3V and not 5V tolerant at all. This would have meant level translators were required on any interface between the Arduino and BeagleBone, but the ChipKit is already 3.3V. The other reason was at full speed the motor encoder ticks come through about 1200 times a second, with two that means about 2500 interrupts a second. I've got no idea how big the interrupt overhead is for the Arduino but I thought if I handle 16 or 32 bit tick counters in the interrupt with that frequency it is going to get a bit close to the limits of available CPU cycles, the ChipKit is 32bit and has an 80MHz clock so plenty of time to do all I needed. The features I've used are all available on the Arduino, due to some pin function constraints you'll need to swap around the pin order a bit but the code should work okay on an Uno (provided it can keep up).
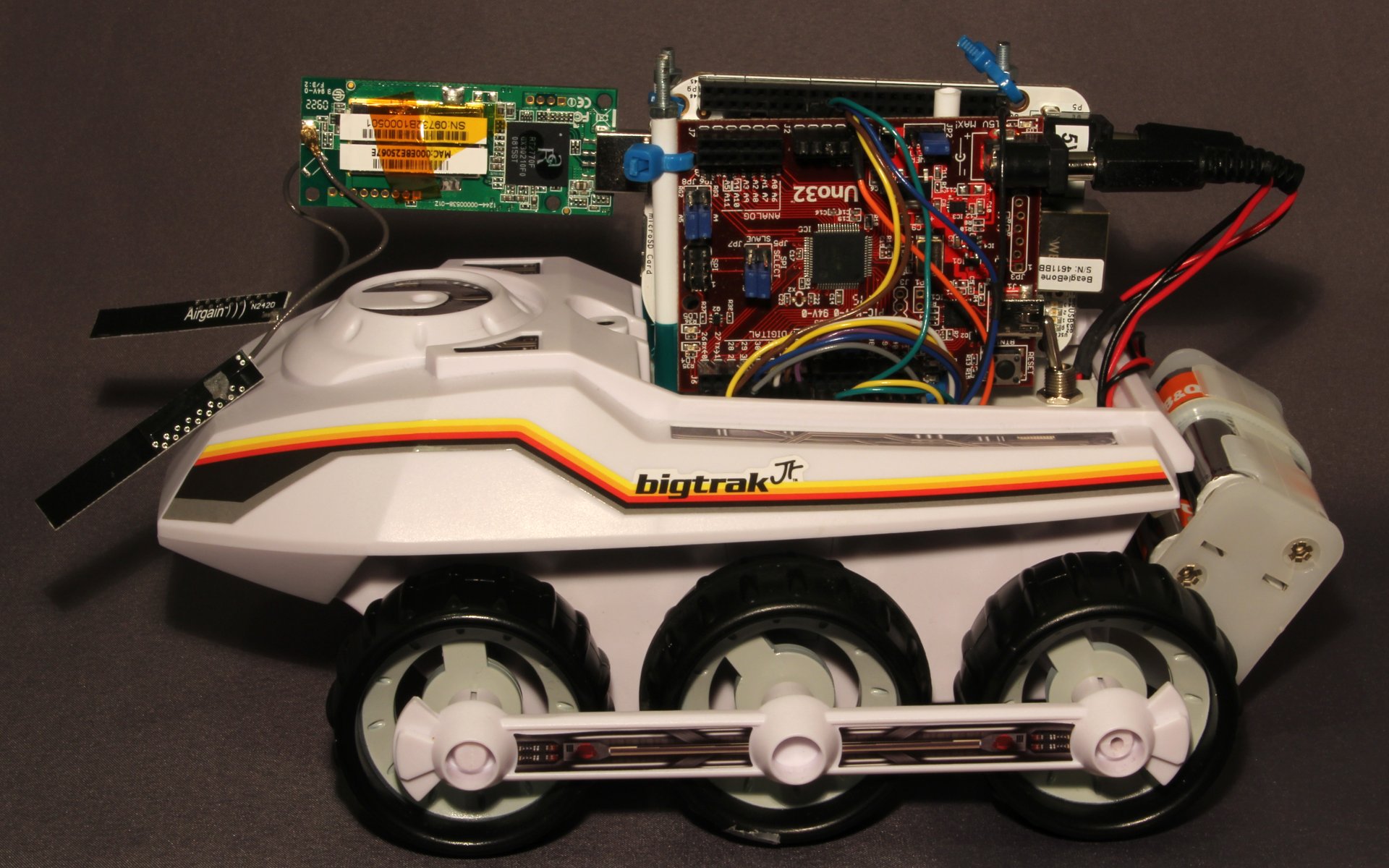
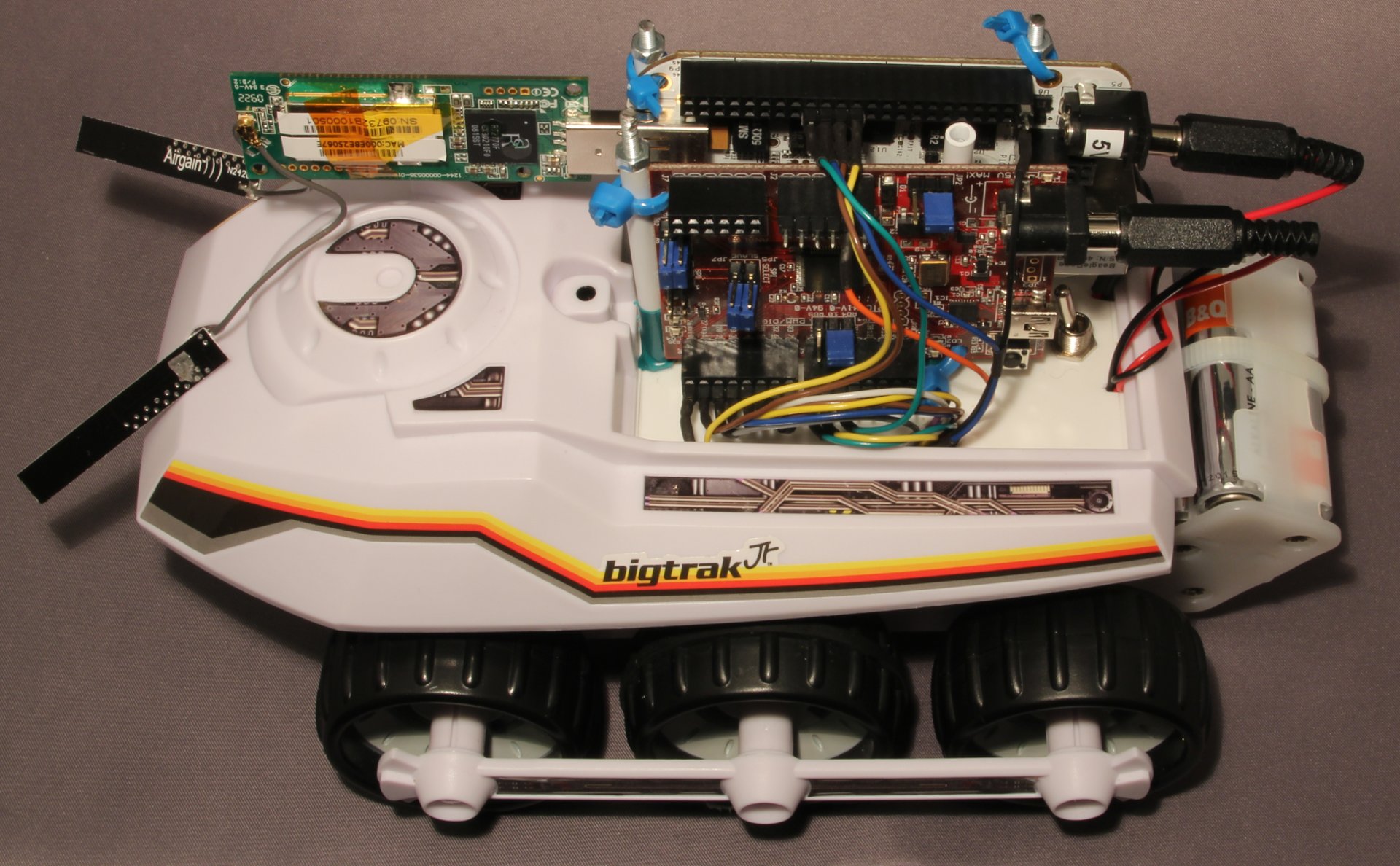
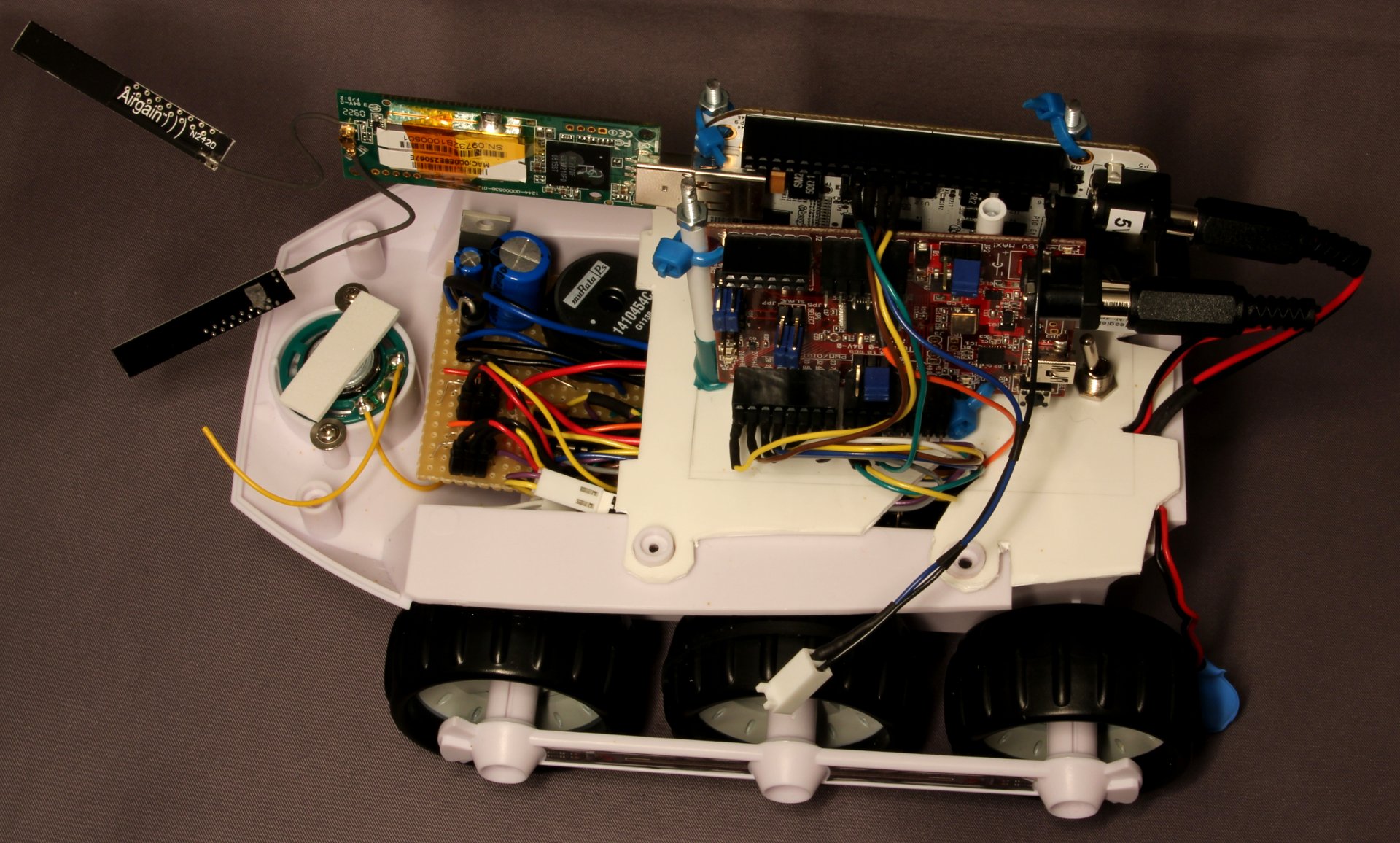
Replacing the BigTrak Electronics
Last updated: 28 Jan 2012 - 17:00

Underneath the Original BigTrak PCB: Not a lot to see, this is a cheap PCB with an epoxy coated silicon-on-board processor.
Internally the BigTrak is a fairly typical modern toy, the circuit board in it with an epoxy covered ASIC in the middle looks like the main circuit board in any cheap radio controlled car. The motor driver H-bridges are built out of discreet transistors, but as the motors only draw about 25mA running current the transistors are nothing remarkable. Quite possibly the most expensive part is the 0.1" header that the keypad plugs into.
Hardware Interfacing on the BeagleBone
Last updated: 27 Jan 2012 - 20:28

BeagleBone: The all new smaller BeagleBone ARM based dev-board is a step up in features from the Beagle Board and a step down in price.
The BeagleBone is an ARM applications processing platform that runs Angstrom Linux and provides a lot of 3.3V I/O connections, for more background see my unboxing and getting started article. In the unboxing review I ran a bit of bundled java-script that flashed a light on and off, but there's much more to using I/O on this powerful processor. Like with most embeded controllers these days half the effort is in getting the right function selected and enabling the pin drivers. There are several steps and modes of operation which I'll go through separately. I'll discuss command line tools and python control here, but there is a pre-written javascript library called bonescript.js that comes pre-loaded on the board that provides an Arduino-like syntax and runs on the node.js javascript interpreter, I'm not going to discuss that here as it is under heavy development and has only very rudimentary features at the moment. I'd recommend having a look through the code if you have a BeagleBone, it's accessible from Cloud9 IDE on port 3000 via a web browser.
H-Bridge Tutorial
Last updated: 25 Jan 2012 - 20:21
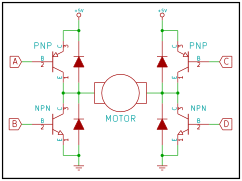
The H-bridge is a circuit used in electronic control of high current devices, particularly where the device polarity may be reversed, e.g. DC motors. The name comes from the fact that the circuit typically looks like a letter "H".
How not to build a RepRap
Last updated: 24 Dec 2011 - 16:03

Actually I have a working RepRap now so it isn't all bad, but there are plenty (too many?) guides about what to do to make a RepRap, I thought I'd just point out the problems and mistakes I made building mine.